Faster convex-convex SAT : partial hulls
Here’s a question I received in my mailbox a while back:
I am looking into the SAT code for small convex meshes here at the moment and it doesn’t seem very effcient. Can you share some ideas how to reduce the number of tests. Especially the number of edge/edge tests seems to grow huge.
There would be a lot to say about this. But one way is to replace colliding convexes with simpler versions (I call them “partial hulls”). Take a look at the following picture:
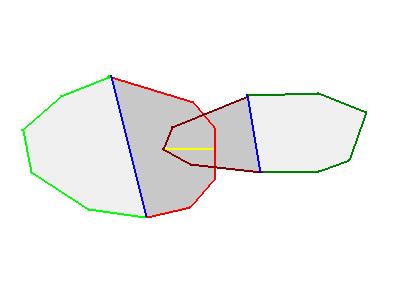
The two overlapping convexes have a red part and a green part. The key observation is that the penetration depth and the penetration direction (the yellow line) do not depend on the green parts - which can be safely ignored. The penetration would be the same if the convexes would be “closed” by the blue segments.
So the trick is simple in theory: ignore the green parts, and compute the penetration distance using the “partial hulls” enclosed between the red and blue segments. It has two direct benefits:
- the number of edge/edge tests is greatly reduced (that’s clearly the main advantage).
- the green vertices can also be ignored in the projection code
How to implement this efficiently is another (long) story, but here is a small proof-of-concept test that already runs orders of magnitude faster than the brute-force Separating Axis Theorem.